IllustraBot2:protocole
Proposition de protocole de communication entre le client (android, joystick ...) et le bras articulé.
Le but principal est d'avoir un protocole KISS pour limiter au maximum l'overhead du au traitement.
Transport
- simple socket TCP sans surcouche
Protocole
- messages de commande
- messages de data
- messages de data envoyés toutes les 10ms
- pour chaque message un ack est renvoyé sous forme de chaine de caractères ("OK") : à étoffer
Format des messages
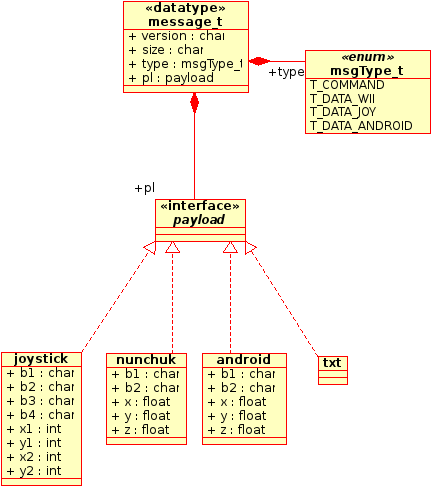
Voir proto.h pour une implémentation de la structure.
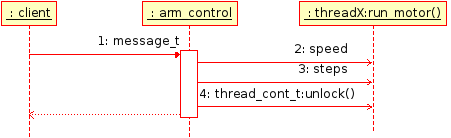
Communication