« AquaMarium » : différence entre les versions
| Ligne 70 : | Ligne 70 : | ||
=== Code source === | === Code source === | ||
Le projet est entièrement OpenSource et OpenHarware. | |||
Le code source et les fichiers de design sont disponibles sur le [https://github.com/fablab-lannion/DataPlus/tree/master/AquaMarium dépôt Data+] du [[Github]] du fablab | Le code source et les fichiers de design sont disponibles sur le [https://github.com/fablab-lannion/DataPlus/tree/master/AquaMarium dépôt Data+] du [[Github]] du fablab | ||
Version du 6 mars 2014 à 02:00

Les votes du Défi Data+ sont maintenant ouverts ! Vous pouver voter pour AquaMarium sur la page du projet
Principe général

Montrer la donnée hauteur d'eau de la marée.
Un petit aquarium dont le niveau varie en fonction de la marée. Il permet de voir physiquement :
- la hauteur d'eau actuelle
- le cycle des marées
- la vitesse de montée/descente
- les coefficients (mortes eaux/vives eaux)
C'est à la fois un objet :
- didactique pour appréhender visuellement ces concepts abstraits;
- décoratif voir promotionnel dans le cadre d'un syndicat d'initiative d'une station balnéaire;
- utile pour tous les travailleurs et usagers de la mer qui peuvent ainsi connaître la hauteur d'eau sans calculs compliqués.
Données sur le site du SHOM ou maree.info ou météo-consult.
architecture
Prototype :
- arduino + ethernet : récupération/extraction des données
- pompe péristaltique pour gérer le déplacement d'eau
- petit aquarium en verre
Réalisation
Contrôle
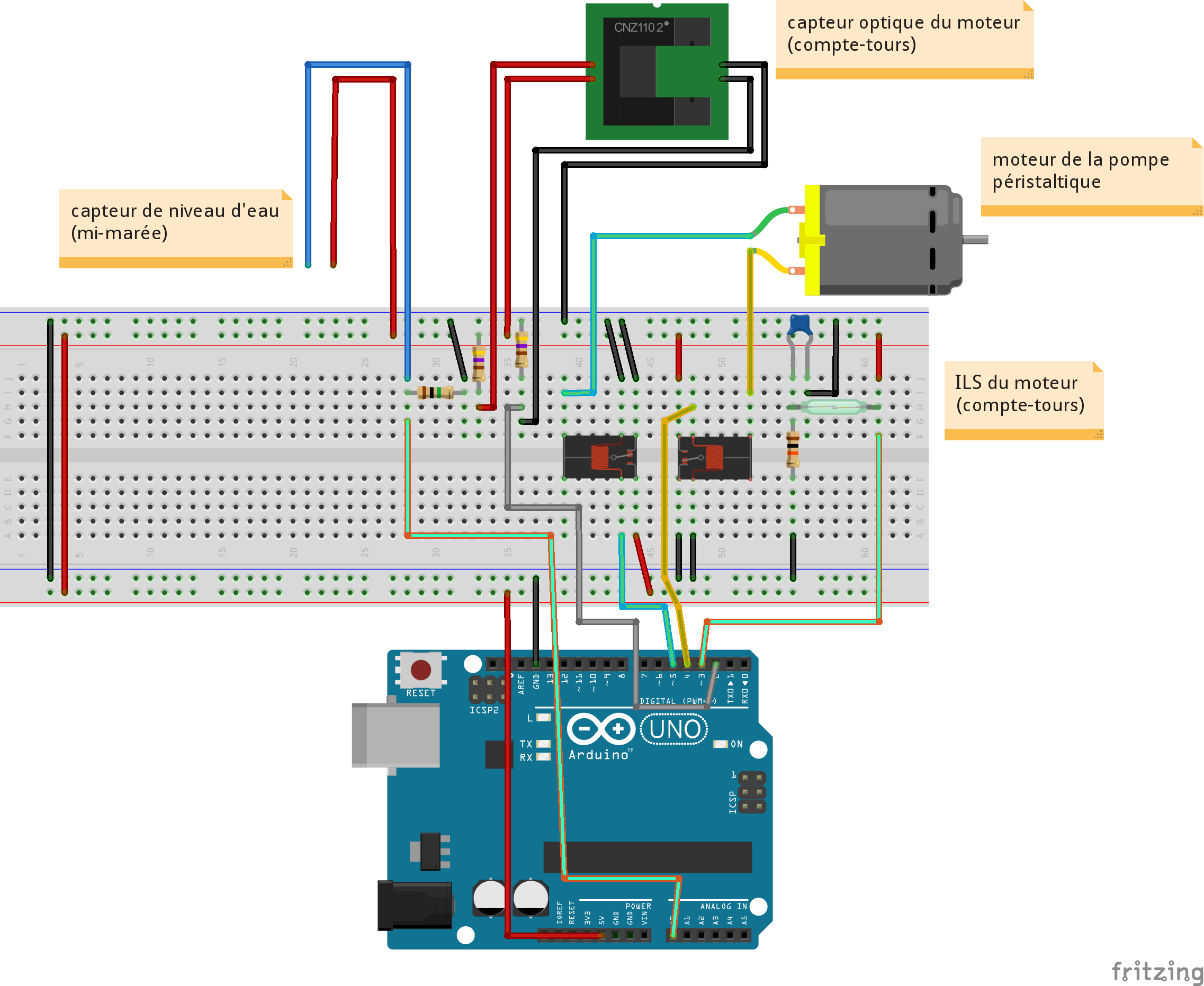
L'organe de commande est composé d'un arduino auquel est adjoint un shield ethernet.
Ses fonctions sont :
- DHCP / DNS
- "crawler web" pour récupérer les data
- interface web de configuration (choisir le lieu de la marée, la taille, la vitesse...)
- commande de la pompe en fonction des déplacements de la marée
- le moteur est contrôlé par 2 relais pour tourner dans les 2 sens
- récupération des données des capteurs
- optique pour l'asservissement moteur
- ILS pour la même fonction, mais qui s'est avéré trop lent
- hauteur d'eau pour recaler le niveau réel
- Schéma
Pompe péristaltique

C'est une pompe réversible. Elle permet donc de déplacer un liquide dans les deux sens.
Le principe général est de pousser le liquide dans un tuyau. Il n'y a pas de contact entre le mécanisme de la pompe et le liquide. Pour plus de détails, voir Wikipedia

- le corps de la pompe est designé et imprimé en ABS au Fablab. (Fichiers source)
- son activation est assuré par un moteur à courant continu (provenant d'une visseuse)
- le moteur est asservi par un capteur optique couplé à une roue dans laquelle sont ménagées 2 fentes
Plus de détails sur sa réalisation : Pompe Péristaltique
Aquarium

- Réalisation en verre à partir d'un double vitrage.
- étanche :)
- un socle sert aussi de compartiment de stockage pour l’électronique, la pompe et le réservoir
- le réservoir est une poche plastique d'un cubitainer de jus de fruits
- sa décoration est réalisée en vinyle peint
Code source
Le projet est entièrement OpenSource et OpenHarware.
Le code source et les fichiers de design sont disponibles sur le dépôt Data+ du Github du fablab
Médias
Photos

Pompe péristaltique

remplissage du réservoir

test du fonctionnement

Électronique en cours de mise au point

Aquarium en cours de construction












Vidéos
- La marée monte !
- Pompe en fonctionnement