Bras de Robot v2
Présentation
Le bras de robot v2 est un petit système simulant un bras pouvant avec 4 degrés de liberté.
Il est piloté par un arduino nano (qu'on alimentera soit par usb soit avec 2 piles 4.5V pour lui donner assez de puissance). L'aspect mouvement est géré par 4 micro-servomoteurs eux même contrôlés par 2 joysticks.
il existe plusieurs versions de la mécanique :
- MeArm sous licence CC:BY-SA
- Fablab (en cours de création)
Matériel nécessaire
Pour réaliser le bras, il faut :
- 4 mini-servo 9g : 7.19$
- 1 arduino nano : 1.43$
- 2 joysticks : 5€ pour 10
- 1/4 d'heure de découpe laser
- 1 plaque de MDF 3mm 30cm x 20cm
Montage
MeArm
- Instructions de montage pour le bras MeArm : http://learn.mime.co.uk/assets/docs/building-the-mearm-deluxe/MeArm_v1.0_Manual_v1.4.pdf
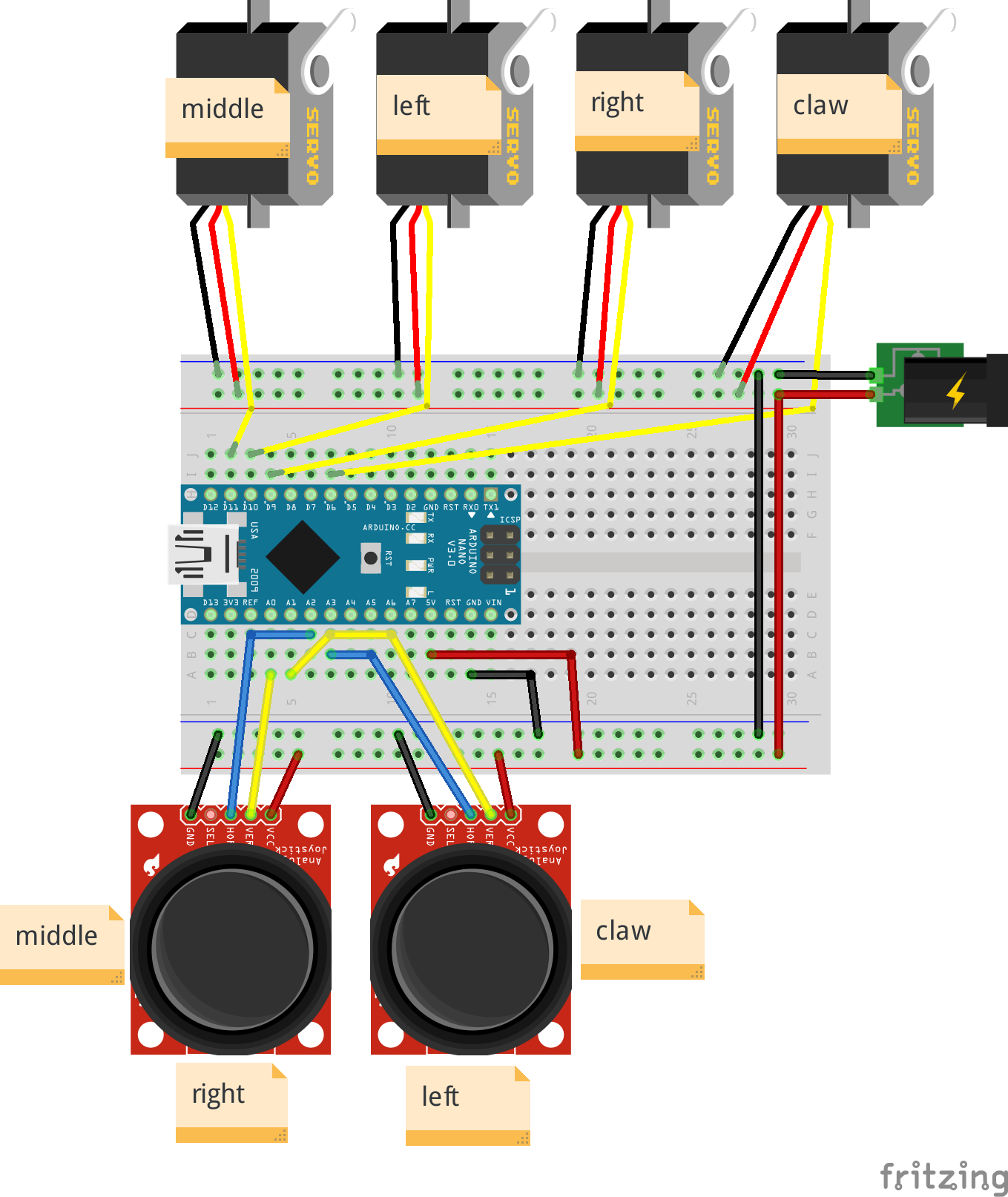
- Schéma de câblage :
Code
Le code est disponible sous github : https://github.com/jerome-labidurie/RobotArm/blob/master/firmware/firmware.ino
Liens
- Bras simplifié : Bras_de_Robot
- La page originale sur MeArm
- Le dépot github complet
Évolutions possibles
- utiliser un électro-aimant à la place de la pince
- réaliser un PCB